



カテゴリー
おすすめ商品







4086 デスクトップロボットアーム 20x20cm ミニロボットフットプリント 3c 産業用ロボットアーム、小さな部品のロードとアンロード
製品ユニットあたりの梱包サイズ 106.00cm * 50.00cm * 103.00cm 製品ユニットあたりの総重量 50,000kg 産業機械アーム インテリジェント AI ビジュアル仕分けソリューション システム ITEM NO.
基礎情報
| モデル番号。 | ZKBOT-4086 |
| 顧客サービス | 1年 |
| 保証 | 1年 |
| 制御モード | ポイントツーポイント制御 |
| 走行モード | 電気の |
| 応用 | 溶接、荷重、鍛造 |
| 状態 | ノイ |
| 認証 | CE |
| ペイロード | 3kg |
| 繰り返し位置精度 | 0.1mm |
| 最大範囲 | 700mm |
| 動作電圧 | AC220V/110V |
| 消費電力 | 100W |
| ドライブ | ハイブリッドサーボモーター + 高精度ヘリカルギヤボックス Re |
| それはATです | 10 入力、8 出力 (1 つは制御盤エラー用)。 |
| 輸送パッケージ | 段ボール箱 |
| 仕様 | 180*180mm 0,2CBM |
| 商標 | 石鹸 |
| 起源 | 中国 |
| HSコード | 8479501900 |
| 生産能力 | 1000個/年 |
梱包と配送
製品ユニットごとの梱包サイズ: 106.00 cm * 50.00 cm * 103.00 cm。 製品単位あたりの総重量: 50,000 kg製品説明
産業用機械アームAIインテリジェントビジュアル仕分けソリューションシステム ITEM NO. ZKBOT-4086
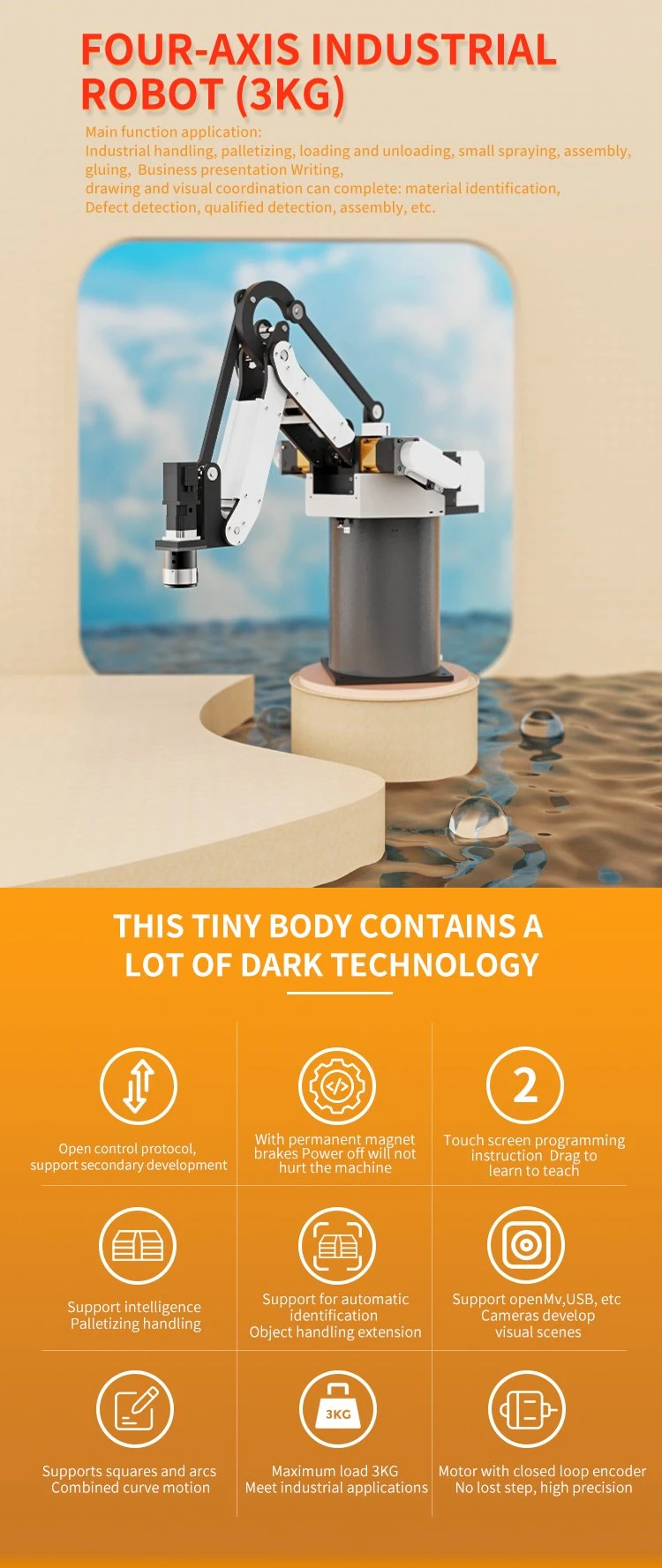
当社の産業用機械アーム。 主な用途用途:産業用ハンドリング、パレタイジング、積み下ろし、組み立て、接着、ビジネスプレゼンテーション。 書き込み、描画、および視覚的な調整により、材料の識別、欠陥の検出、適格な検出、組み立てなどを完了できます。

Q1:サイクルワークの調整はしてもらえますか? A1: タッチ スクリーンは 50 ステップ以内の移動ノード サイクルをサポートでき、PC は無制限のステップ サイクルをサポートできます。 Q2: 端末の電源を切ったときに学習ポイントを自動的に保存する機能はありますか? A2: はい。
Q3: ロボットをオープンソースにすることはできますか? A3: 完全なオープンソースではありません。最下層はマニピュレータ制御用の通信プロトコルを提供し、周辺機器や追加機能の二次開発をサポートし、オンラインで外部デバイスと対話します。
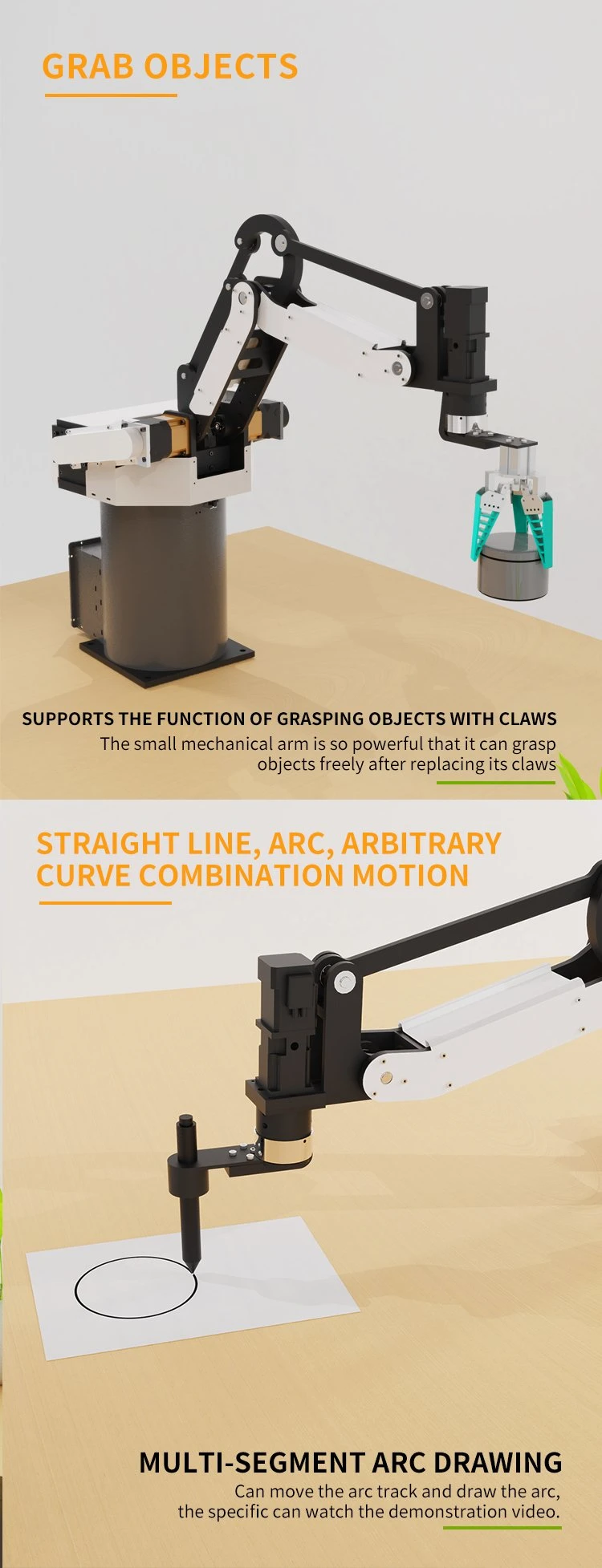
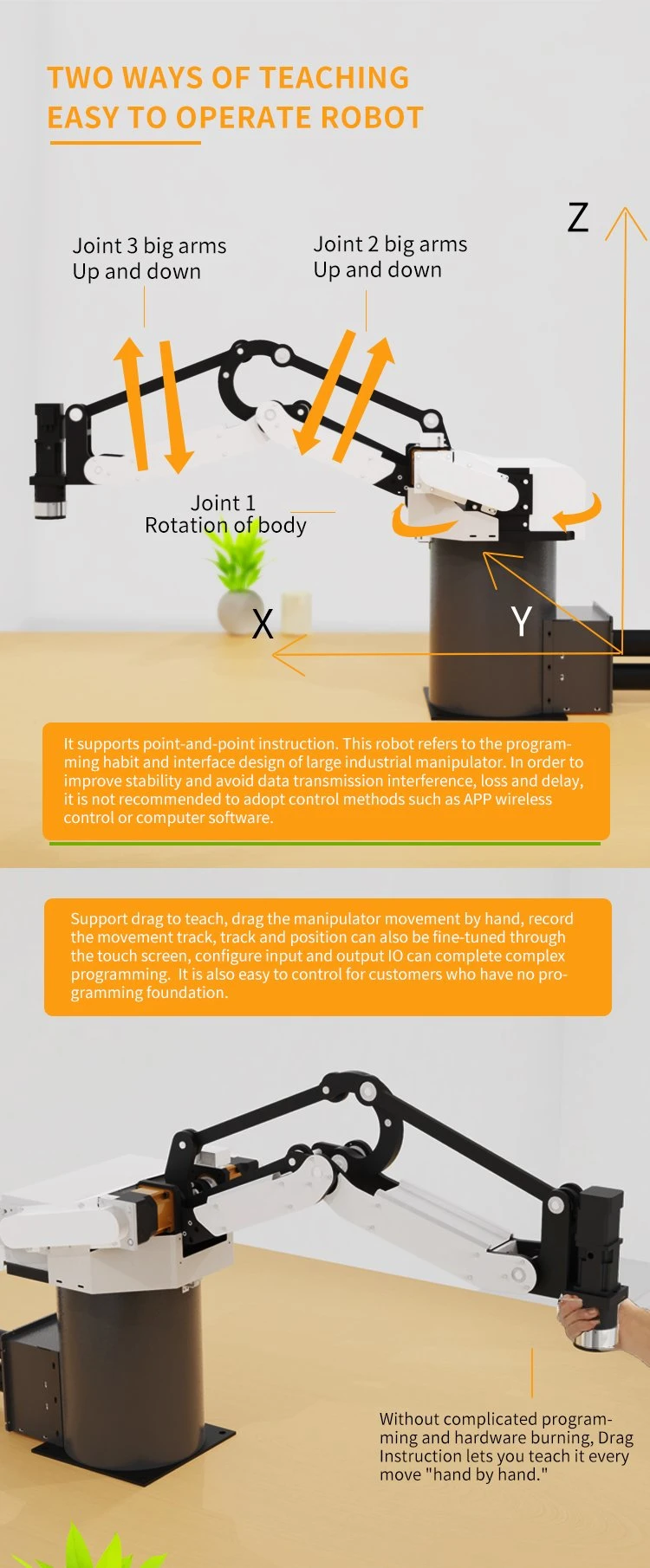
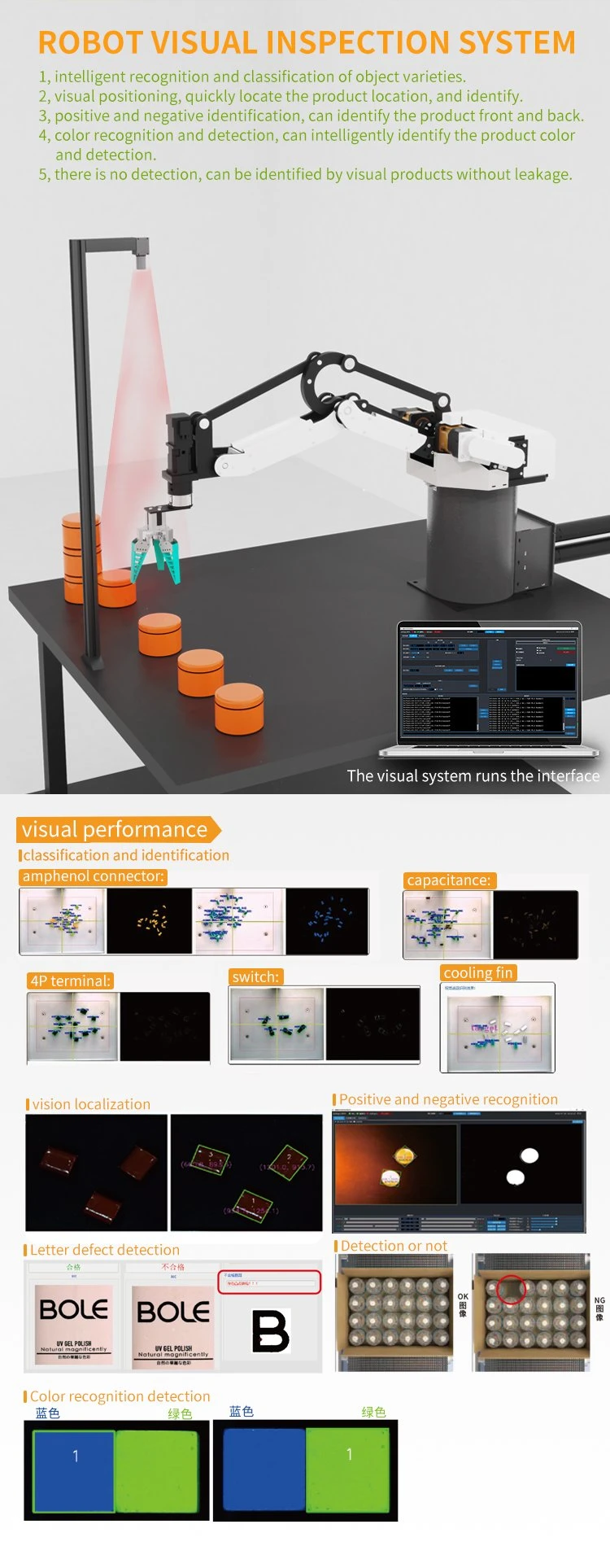
オープンな制御プロトコル、二次開発をサポートします。 永久磁石ブレーキ付。 スイッチを切っても機械は損傷しません。 タッチスクリーンプログラミングガイド。 学び、教えるために絵を描きます。 インテリジェンスをサポートします。 パレタイジングハンドリング。 自動識別のサポート。 オブジェクト処理拡張機能。 openMv、USBなどのカメラをサポートビジュアルシーンを開発します。 正方形と円弧をサポートします。 曲線を組み合わせた動き。 最大積載量3kg。 産業用途、オープンフロア、オープンモーション制御、シリアルポート、通信プロトコルを満たし、ロボットアームのユーザー機器の二次開発は操作が簡単で、産業用ハンドリング、パレタイジング、積み下ろし、小規模なスプレー作業に使用できます。ポイントツーポイント - ポイント、ポイントツーポイントサポートライン、ラインツーライン、円弧、DO出力、DI入力、ワールド座標を含むので、真っ直ぐ上下します。 制御プロトコルは、openMv、USB、およびその他のカメラをサポートして、視覚的なシーンや視覚的なインタラクションを開発し、オブジェクトのサイズと位置を識別して、それを転送することもできます (独自の上位コンピューターを開発する必要があります)。外部デバイスをオンラインで使用できるため、小規模な工業生産に使用できます。 このロボットアームには取扱説明書装置も装備されており、使いやすく、すぐに使用できます。 指示装置は手動指示とプル指示をサポートします。 3 つのユーザー配合と 3 つの独立したプログラムをサポートし、各プログラムは 50 ポイントのプログラム可能数、マニピュレーターの最大荷重は 3kg までです。 ハンドリング機能:アイテムを吸引するための3kgエアポンプをサポートします。 小型ロボットアームは非常に強力で、最大 3 kg の物体を簡単に保持できます。 物体を掴む:爪で物体を掴む機能をサポートします。 小さな機械アームは非常に強力で、爪を交換すると物体を自由に掴むことができます。 直線、円弧、任意の曲線を組み合わせた動き: マルチセグメントの円弧描画。 円弧軌跡を移動して円弧を描くことができ、デモビデオを視聴することができます。 2つの教え方。 使いやすいロボット: 3 本の大きなアームで上下に関節を動かします。 大きなアーム2本を上下にジョイント。 体の関節1回転。 ドットアンドドット命令をサポートします。 このロボットは、大型産業用マニピュレーターのプログラミング習慣とインターフェース設計を参考にしています。 安定性を向上させ、データ伝送の干渉、損失、遅延を回避するために、ワイヤレスAPP制御やコンピューターソフトウェアなどの制御方法の使用はお勧めしません。 ドラッグツーティーチングをサポートし、マニピュレータの動きをハンドドラッグし、動きのトレースを記録し、トラックと位置もタッチスクリーンから微調整でき、入出力IOを構成して複雑なプログラミングを完了できます。 プログラミングの知識がないお客様でも簡単に制御できます。 複雑なプログラミングやハードウェアの書き込みを行わなくても、ドラッグ命令を使用してあらゆる動きを「手作業で」教えることができます。 ロボット視覚検査システム: 1、オブジェクトの種類のインテリジェントな検出と分類。 2、視覚的な位置決め、製品の位置の迅速な位置特定と識別。 3、プラスとマイナスの識別、製品の表と裏を識別できます。 4、色の認識と認識は、製品の色と認識をインテリジェントに識別できます。 5、検出はなく、漏れのない視覚的な製品によって識別できます。 視覚性能:分類と識別。アンフェノールコネクタ:。容量:4Pコネクタ:スイッチ:冷却フィン:視覚定位、プラスとマイナスの検出、文字エラー検出、検出の有無、色検出検出。積み積み整列:1、パレタイジングサポート3kgの商品。 2、アルミ合金ボディ+高強度プロセスの可動部品は、産業用の24時間連続稼働に耐えます。 3、閉ループエンコーダモーター、高いパレタイジング精度。 生産ラインでの I/O 制御とマルチマシンオンライン作業をサポート: 入出力 IO 6、外部信号 IO 入力トリガー制御ロボットまたはロボット IO 出力信号トリガー制御外部デバイスをサポートします。 8 つの操作命令と正確な座標、速度設定など。アクティブになると黄色に変わるコマンド セット選択ボックス。 点命令は点を横切る命令、円弧は円弧を描く命令、直線と直線オフセットはいずれも直線を横切る命令です(前者は絶対反対位置、後者は相対位置)。 。 DI/DO は IO 入力および出力です (それぞれ 6 つのインターフェイス)。 各ステップの座標位置と速度状態をリアルタイムに表示します。 ティーチングポイントは最大50点まで保存できます。 3 つの定式化がサポートされています。 合計3つの演算式に対応できます。 各式は 50 のステップをサポートします。 コマンド状態 パラメータ設定インターフェース:座標系切り替え、ワールド座標(3軸連動) 関節座標(1軸動作) リアルタイム座標 現在のマニピュレータ角度(関節座標) 現在のマニピュレータのワールド座標、そのmmギア。 ギア選択画面を参照してください。 合計レートの走行速度比 (1 ~ 100)。 値を 0 に設定することはできません。 ステップ間の遅延。 シャーシコントロール。 素晴らしいアームコントロール。 前腕のコントロール。 合計 3 つのランニングフォーミュラがサポートされており、各フォーミュラは 50 ステップをサポートします。 コマンド セットの選択: 点、円弧、線、線オフセット DI、DO。 ターゲットの座標。 シングルステップ速度。 繰り返し精度:±0.05mm ジョイント座標とワールド座標を使用します。 位置 ティーチング装置をタッチすることで精度調整、位置調整が可能です。 産業用ロボットの設計に従って、マニピュレータの機能命令は次のとおりです: ロボット アーム ゼロ校正プロトコル命令、ロボット アーム停止プロトコル命令、マニピュレータ コントロール シャーシ プロトコル命令、マニピュレータ コントロール アーム モータ プロトコル命令。 マニピュレータ コントロール アーム モータ プロトコル命令、エア ポンプ スイッチ プロトコル命令、手動グリッパ スイッチ プロトコル命令。 現在の世界座標を取得します (マニピュレーター)。 プロトコルの説明。 現在の角度(マニピュレータ)を取得します。 プロトコルステートメント。 現在の入力ステップ (マニピュレータ) を取得します。 プロトコル ステートメント Arc プロトコルの説明。 DIDO プロトコル命令を制御します。 コントロールハンドルプロトコル命令 プロトコル命令 制御エアポンプ プロトコル命令 機械制御 シリアルポート通信プロトコル パラメータ:最大拡張範囲は910.80mmです。作業範囲の側面図。最終組み立て穴の寸法。作業範囲の上面図。パッケージの詳細:ロボット標準適合食事。1 ロボット本体、1 コントロールボックス、1 タッチ教示装置、オントロジーコントロールボックスの特別な接続ライン、タッチスクリーンラインに接続。 ビジュアル モジュール (オプション): ビジュアル モジュール (工場出荷時の設定)。 用途:分類検出、視覚的位置決め、ポジティブおよびネガティブ検出、色検出検出、有無検出、文字エラー検出。 視覚システムパラメータ: 画像要素: 500 W。識別精度: ± 0.1 mm。 アライメント範囲:±1mm 識別範囲:ニーズに応じて調整可能。 用途:通常品の分別・ハンドリング・パレタイジングに使用します。 不規則な小さな物体の検出や高い位置精度には適しません。 カメラは一時的にロボット アーム プロトコルの使用をサポートします。 ・実行速度:(最適軌道計測を行わない場合、単一物体の平均検出速度は約6秒) ・画像検査システムパッケージ:産業用4軸ロボット(3kg)+カメラ+視覚認識ソフト+産業用パソコン。